3.2 工作空间覆盖
场景
同一工作空间下不允许出现功能包重名的情况,但是当存在多个工作空间时,不同工作空间下的功能包是可以重名的,那么当功能包重名时,会调用哪一个呢?
比如:自定义工作空间A存在功能包turtlesim,自定义工作空间B也存在功能包turtlesim,当然系统自带工作空间也存在turtlesim,如果调用turtlesim包,会调用哪个工作空间中的呢?
概念
所谓工作空间覆盖,是指不同工作空间存在重名功能包时,重名功能包的调用会产生覆盖的情况。
作用
没什么用,这种情况是需要极力避免出现的。
演示
1.分别在不同的工作空间下创建turtlesim功能包。
终端下进入ws00_helloworld的src目录,新建功能包:
ros2 pkg create turtlesim --node-name turtlesim_node
为了方便查看演示结果,将默认生成的 turtlesim_node.cpp 中的打印内容修改为:ws00_helloworld turtlesim\n
终端下进入ws01_plumbing的src目录,新建功能包:
ros2 pkg create turtlesim --node-name turtlesim_node
为了方便查看演示结果,将默认生成的 turtlesim_node.cpp 中的打印内容修改为:ws01_plumbing turtlesim\n
2.在 ~/.bashrc 文件下追加如下内容:
source /home/ros2/ws00_helloworld/install/setup.bash
source /home/ros2/ws01_plumbing/install/setup.bash
修改完毕后,保存并关闭文件。
3.新建终端,输入如下指令:
ros2 run turtlesim turtlesim_node
输出结果为:ws01_plumbing turtlesim,也即执行的是 ws01_plumbing 功能包下的 turtlesim,而 ws00_helloworld 下的 turtlesim 与内置的 turtlesim 被覆盖了。
原因
这与~/.bashrc中不同工作空间的setup.bash文件的加载顺序有关:
1.ROS2 会解析 ~/.bashrc 文件,并生成全局环境变量 AMENT_PREFIX_PATH 与 PYTHONPATH,两个环境变量取值分别对应了 ROS2 中 C++ 和 Python 功能包,环境变量的值由功能包名称组成;
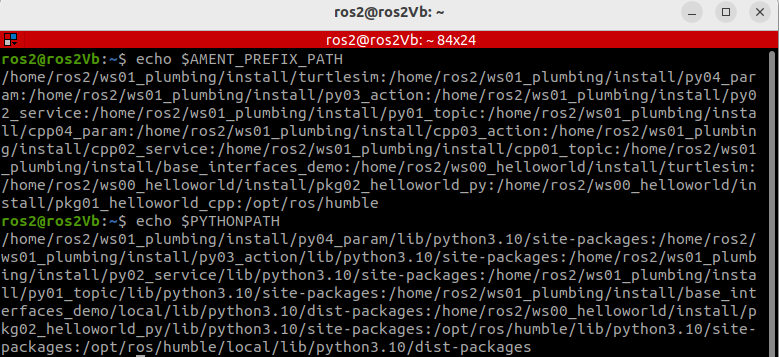
2.两个变量的值的设置与 ~/.bashrc 中的 setup.bash 的配置顺序有关,对于自定义的工作空间而言,后配置的优先级更高,主要表现在后配置的工作空间的功能包在环境变量值组成的前部,而前配置工作空间的功能包在环境变量值组成的后部分,如果更改两个自定义工作空间在 ~/.bashrc 中的配置顺序,那么变量值也将相应更改,但是 ROS2 系统工作空间的配置始终处于最后。
3.调用功能包时,会按照 AMENT_PREFIX_PATH 或 PYTHONPATH 中包配置顺序从前往后依次查找相关功能包,查找到功能包时会停止搜索,也即配置在前的会优先执行。
隐患
前面提到,工作空间覆盖的情况是需要极力避免出现的,因为导致一些安全隐患:
- 可能会出现功能包调用混乱,出现实际调用与预期调用结果不符的情况;
- 即便可以通过 ~/.bashrc 来配置不同工作空间的优先级,但是经过测试,修改 ~/.bashrc 文件之后不一定马上生效,还需要删除工作空间下build与install目录重新编译,才能生效,这个过程繁琐且有不确定性。
综上,在实际工作中,需要制定明确的包命名规范,避免包重名情况。