第6章 ROS2工具之可视化
机器人系统运行之后,调用者应该如何与机器人交互呢?机器人还会产生诸多数据,比如:里程计、激光雷达、imu、GPS、导航规划的路径、自身实际的运行轨迹......等等各种消息,这些消息对于调用者而言是肉眼不可见的,那么应该如何转换成“可视化”的数据,让调用者可以以机器人的视角看世界呢?另外,人机交互过程中,机器人模型也是“可视化”的重要一环,在ROS2中如何实现机器人建模呢?针对上述问题,本章将会逐一给出解答。
本章概览
| 章节 | 学习内容 | 学习收获 |
|---|---|---|
| 6.1 可视化与机器人建模简介 | 可视化与机器人建模的概念、作用以及应用场景等。 | 初步了解rviz2与urdf的理论知识。 |
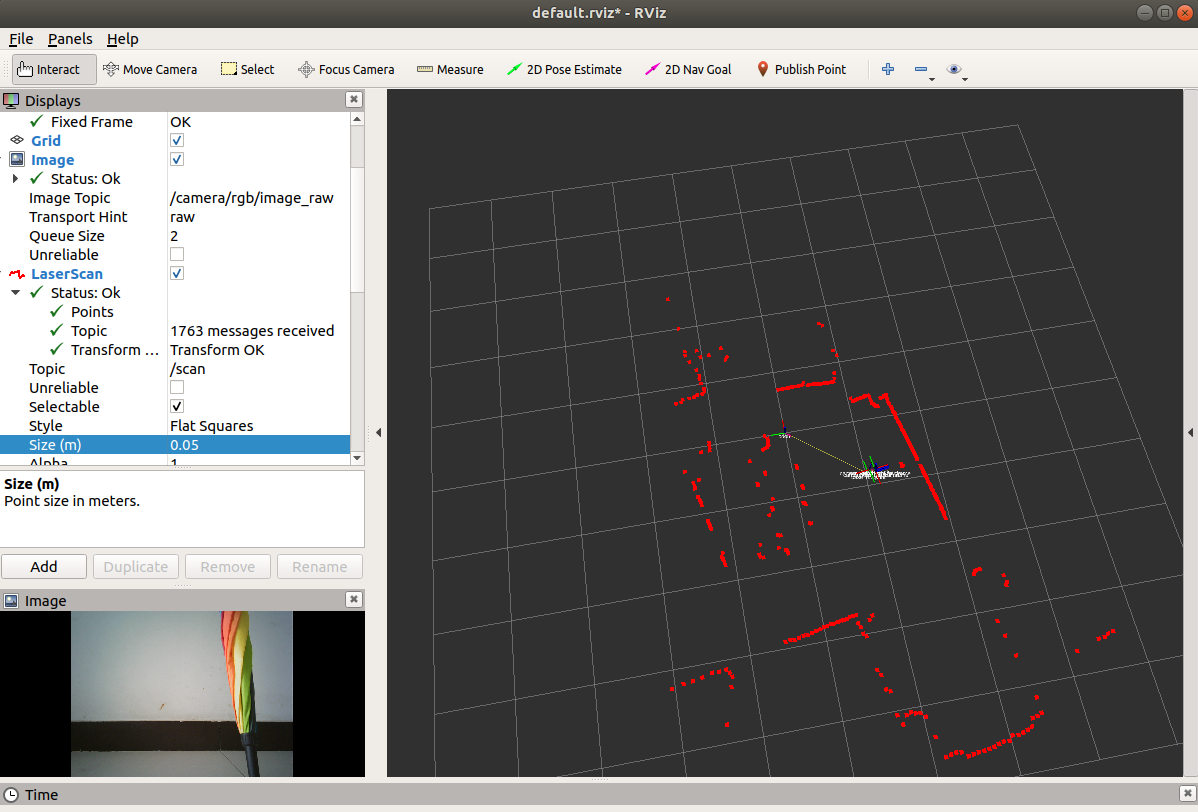
| 6.2 rviz2 基本使用 | rviz2的安装、启动、界面与基本操作。 | 能够掌握rviz2的使用流程。 |
| 6.3 rviz2集成URDF基本流程 | 介绍如何编写、加载urdf文件,以及如何在rviz2中集成机器人模型插件。 | 能够在rviz2中显示一个最简单的机器人模型。 |
| 6.4 URDF使用语法 | URDF的具体使用语法介绍。 | 能够在rviz2中显示一个四轮机器人底盘,并且也可以自定义机器人模型。 |
| 6.5 URDF优化_xacro | xacro的具体使用语法介绍。 | 可以使用xacro简化urdf文件。 |
| 6.6 本章小结 | 知识点汇总。 | 知识点回顾。 |
案例演示
案例1:rviz2基本使用演示。
案例2:在rviz2中显示自定义机器人模型。